学习中心
通过我们提供的不同级别的电子文档模块,了解CAN及相关技术、Kvaser硬件、t脚本等更多内容。在这里,您可以按照自己的节奏和时间表提升技能。
订阅我们的技术新闻
CAN

CAN
CAN 协议是一个用于串行数据通信的 ISO 标准(ISO 11898)。该协议旨在应用于汽车领域。如今,CAN 已被广泛应用于工业自动化以及汽车和移动机械中。


E-learning
欢迎来到我们的在线学习平台,这是提升您在编程、CAN、Kvaser硬件产品等方面技能的门户。我们提供适合初学者和有经验开发人员的在线学习模块。您可以在这里按自己的节奏提升知识和专业技能。




解决方案
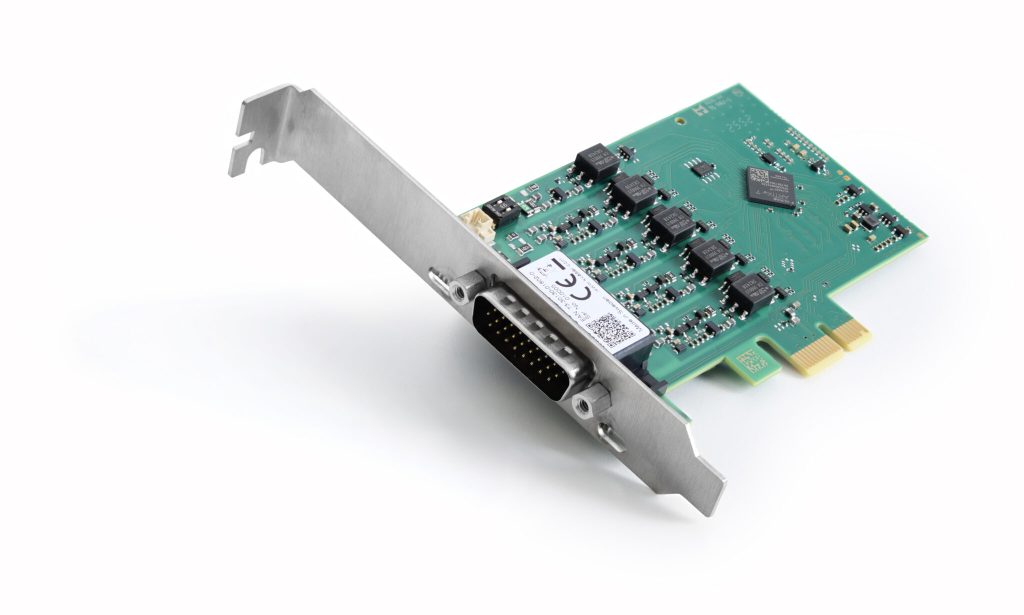
新品速递!Kvaser推出PCIe 4xLIN接口,打造新一代LIN连接方案
Kvaser PCIe 4xLIN是一款面向PCI Express的全新四通道LIN接口,专为需要在台式机、工业或HIL(硬件在环)系统中实现可靠、时间戳精确的LIN通信的工程师而设计。 Kvaser PCIe 4xLIN采用紧凑型PCIe封装,集电气隔离、精准时序控制和高级同步功能于一体。该接口专为汽车和工业应用设计,助力开发和测试工程师采集精确数据、简化分析流程,并支持从单节点测试到复杂分布式系统测试的扩展。 与现有工具实现更快速集成 Kvaser PCIe 4xLIN兼容基于Kvaser LINlib构建的应用程序,无需更改软件即可无缝接入现有工作流。同时,适配其他Kvaser LIN硬件开发的应用程序,无需修改即可运行,有助于团队在不同项目和接口间快速切换。 Kvaser PCIe 4xLIN同时支持Windows和Linux操作系统,并兼容Kvaser CANlib SDK,提供包括C、C++、C#、Python、Delphi和Visual Basic在内的API及示例代码。 与其他PCIe接口一样,Kvaser PCIe 4xLIN可便捷集成至现有系统。该接口可直接插入PCI Express插槽,由主机系统供电,减少布线数量,简化小型设备与测试机柜的集成部署。 典型应用包括ECU(电子控制单元)开发、汽车车身电子、HIL测试、多通道记录以及工业LIN通信系统。 可靠的多通道LIN通信 Kvaser PCIe 4xLIN通过单张半高型PCIe板卡提供四个功能完备且具备独立电气隔离的LIN通道,使工程师能够通过单一接口高效地监控和测试多个LIN网络。 基于FPGA的Kvaser LIN-IP技术支持高达20 kbit/s的LIN通信,时间戳分辨率可达1µs。开发人员可高精度采集时序敏感事件,提升调试与验证阶段的数据可视性。 此外,该接口支持与多个Kvaser接口同时运行,允许团队可根据系统复杂度按需扩展测试环境。 通过Kvaser TimeSync实现跨系统精确计时 Kvaser PCIe 4xLIN支持基于软件的Kvaser TimeSync,帮助工程师在多个接口和系统间保持时间戳同步。 在分布式测试环境中,同步计时便于对LIN和CAN网络中的事件进行关联分析,减少手动日志分析,并提升验证与故障排查期间的可追溯性。 针对Linux 用户,该接口提供PHC(PTP硬件时钟)设备,可使用phc2sys等标准工具同步至共享的主机参考时钟源。 结合 1 µs 的时间戳精度,这为团队在互联系统中进行同步记录、自动化测试和精准事件分析提供了可靠的基础。 专为工业与嵌入式系统设计 半高型PCIe设计适用于各类工业与嵌入式系统,包装内附长短两种安装挡板,便于灵活安装。 该接口工作温度范围为-40 °C至+85 °C,四路LIN通道集成单路26针高密度D-SUB接口,助力团队在严苛环境下构建紧凑且高可靠的测试系统。 探索Kvaser PCIe 4xLIN Kvaser PCIe [...]
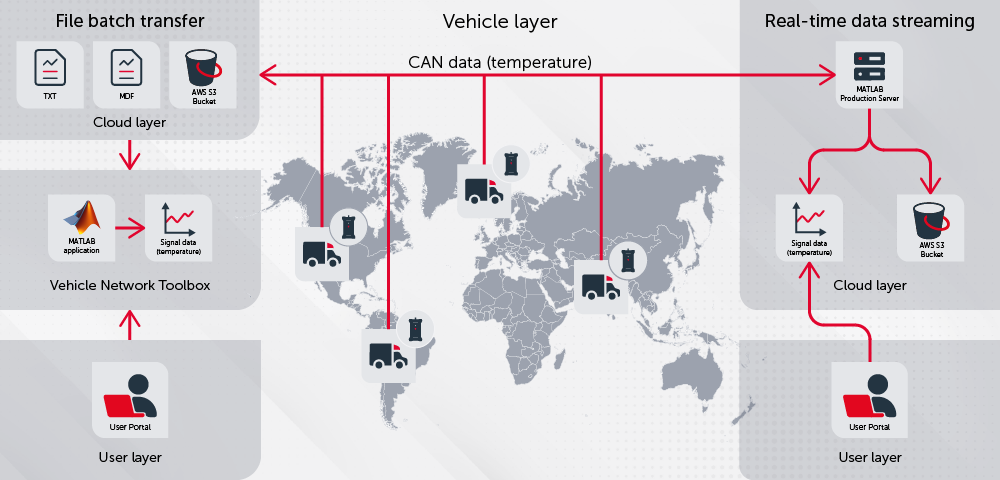
打破物理连接束缚:Kvaser Edge携手MATLAB打造远程CAN数据工作流
随着车辆系统日益复杂,工程团队面临时间紧、物理访问受限及团队分散的挑战。无论是验证算法、采集CAN数据还是支持远程同事,一个难题始终存在:工程师仍被物理线缆绑定在测试硬件上。 在2026北美MathWorks汽车大会上,Kvaser与MathWorks联合证明:现状并非不可改变。 挑战:物理束缚与僵化的数据链路 许多团队面临以下痛点: 工程师必须在现场采集数据 分析前需要手动传输数据 云端工作流灵活性差或存在厂商锁定 远程专家难以访问实时数据 采集与分析脱节,减缓迭代速度 解决方案:全远程、灵活的CAN链路 Kvaser现场应用工程师Adam Raymer与MathWorks软件工程师Govind Suresh打造了一套演示系统,使用Kvaser Edge将CAN数据同时流式传输至三个目的地: AWS S3(.txt日志); AWS S3(MF4文件); 通过MATLAB Production Server (MPS)传输至云端MATLAB。 CAN数据在Kvaser CanKing 7中模拟,以500 kb/s(约1条报文/秒)模拟温度上升信号。数据以500条记录为一批次发送,采用单一采集管道与灵活的输出路径。 实时MATLAB数据流支持实时绘图与分析。原始报文接入后,通过VNT函数(如canMessageTimetable、canSignalTimetable和canDatabase)结合CAN DBC解码为结构化时间表。温度信号被即时可视化,并使用mdfWrite保存为MDF文件。 同时,S3日志支持回放、深度分析与自动化。 由于Kvaser Edge设备联网并内置Web服务器(Apache2),整个设置可通过浏览器界面远程监控和控制。演示期间,Govind使用手机连接系统并直接刷新数据,展现了方案的灵活性。 核心特性包括: 无线测试:通过任何浏览器远程访问和控制系统,适用于长时间测试、共享车辆及分布式团队。 无云端锁定:工作流由脚本驱动,数据可根据需求发送至AWS、Azure、Google Cloud或直接发送至MATLAB。 借助MPS实现可扩展的远程分析:MATLAB Production Server支持Edge硬件调用云端已部署的MATLAB函数,无需本地安装MATLAB。凭借多核处理,MPS可扩展以处理更高数据速率和更大数据集,并在需要时并行处理数据流。 该方案在更大规模车队和多种信号中扩展性良好。解码工作流不受数据量影响,且canSignalTimetable等函数允许用户将特定信号提取至专用时间表。实时CAN数据写入MDF文件,为长期存储提供了实用方案,支持后续在MATLAB中重新加载和分析。 更快的迭代循环:借助实时数据流、即时可视化和远程访问,工程师可实时验证算法并调整参数,无需等待手动数据传输。 面向未来的架构:采用开放文件格式和标准云服务,该工作流可集成至现代DevOps流水线和自动化测试环境。特别适用于车队测试等场景,未来有望可扩展至OBD2诊断和整车数据采集等领域。 结论 Raymer表示,MathWorks年度大会的观众对系统的灵活性表示认可:“许多人对能够选择任意云目的地,并通过简单的浏览器界面(甚至手机)控制一切感到惊讶。” 虽然该特定MPS工作流尚未发布,但MathWorks文档中已有类似的CAN数据处理示例。目前,Raymer和Suresh正持续优化该方案并探索更多应用场景。 了解更多 探索该演示背后的技术,请访问: Kvaser Edge MathWorks Vehicle Network Toolbox MATLAB Production Server [...]

Kvaser全新推出Edge WL420S:以AI硬件架构与双以太网功能,升级拓展Edge平台
随着边缘应用场景日益复杂,市场对更快、更智能的边缘数据处理能力以及更广泛的连接能力提出了更高要求。Kvaser Edge WL420S凭借专为AI设计的硬件架构与增强型以太网网络功能,满足了这些需求。 Edge WL420S的核心搭载集成式神经处理单元(NPU),这使得Kvaser Edge平台能够直接在设备上运行支持AI的边缘应用,主要面向异常检测、预测性维护、智能数据过滤等场景。 为提供更高的网络灵活性,Kvaser Edge WL420S配备了双以太网连接,可实现更高的数据吞吐量,并支持汽车与工业环境中更先进的网络架构。 基于Linux的KEOS(Kvaser Edge OS)为整个平台提供了底层支撑,为现代边缘计算与工业连接应用打造了稳健且安全的环境。 点击此处,了解更多关于Kvaser Edge WL420S及Kvaser Edge平台的全方位信息。 前往产品页面 Kvaser Edge平台